Rotor de antenas AZ-EL con material recuperado por Jorge LU1DA

Esta idea surgió de la necesidad de contar con un pequeño rotor AZ/EL para el
seguimiento de satélites,tanto para su uso práctico cómo para fines
educativos en el Radio Club.
Sabemos que los rotores son uno de los accesorios más caros, y si hablamos de rotores de elevación, además son escasos.
La construcción de un rotor puede ser una buena oportunidad para divertirnos, agudizar nuestro ingenio constructivo y aprender sobre nuevos temas,como es el caso de las placas Arduino.
Lo primero que debemos hacer es plantearnos que tipo/tamaño de antenas vamos a mover, en función de esa elección, trabajaremos con la parte mecánica.
En este caso la idea era contar con un rotor de pequeño tamaño, para poder llevarlo en salidas de Día de Campo, por ésto ,
sólo puede mover antenas pequeñas, las mismas que se usan habitualmente
en seguimientos manuales (yaguis livianas,moxon-yagui,open-sleeve,etc); y debía ser realizado íntegramente con materiales recuperados o de acceso
relativamente sencillo. La idea es que cualquier aficionado sin acceso a
material dedicado, ni gran capital, pueda armarlo. Por supuesto que cada uno adaptará los materiales que tenga a mano.
El proyecto se divide en dos partes, la mecánica,es decir los rotores en
sí; y la electrónica, el circuito que va a permitir comandarlos y
conectarlos a una pc para un seguimiento automático.
Esta segunda parte, actualmente es la más sencilla, la oferta actual de
microcontroladores y plataformas tipo PIC y Arduino nos simplifican la tarea.
En el sitio Radio Artisan: https://blog.radioartisan.com/
un blog
desarrollado por K3NG Anthony Good, y dedicado al desarrollo de muchos
accesorios basados en Arduino, encontramos un muy completo control de rotores que
está pensado para poder manejar casi cualquier tipo de motor, y muchos
tipos de sensores de posición.
 |
| La pantalla de bienvenida del controlador de rotores |
Realmente Anthony pensó en todo, y si bién el sketch de Arduino es
bastante complejo, está muy bien documentado (incluido un grupo de
discusión donde aclarar dudas y proponer modificaciones) con una
meticulosa lectura de las ayudas, ya tenemos resuelto el problema del
control.
La parte mecánica es la que plantea el mayor problema, seleccionar los
motores (deben tener la fuerza suficiente y no ser muy voluminosos) y
que tipo de desmultiplicación usar.
Se usaron un par de motores PaP idénticos con sus placas de
control, que se sacaron de unas viejas fotocopiadoras. Sólo les faltaba
el generador de clock, pero se suplantó con un simple 555, como
generador de onda cuadrada.
 |
| Despiece de la parte mecánica |
Estos motores están pensados para trabajar con unos 30V, pero al
probarlos con 12V mantuvieron un torque aceptable, que sumado a la
desmultiplicación, nos puede mover una antena sin problemas.
Esta desmultiplicación también fue "donada" por viejas fotocopiadoras e
impresoras láser.
Para el rotor de azimuth también se usó una transmisión a 90º que perteneció a un equipo de radio surpluss.
Como esqueleto de soporte se utilizó una chapa de aluminio de 2 mm. también recuperada.
Recordemos que este rotor no va a estar a la intemperie, y el hecho de
quedar parte de su mecanismo a la vista nos ayuda al objetivo educativo
de este proyecto.
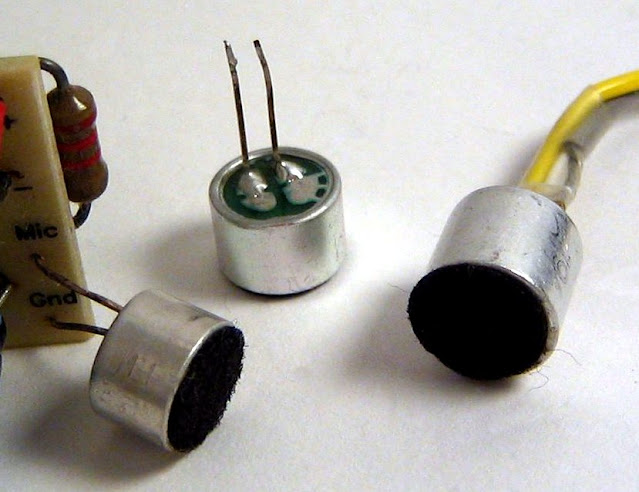
Para sensar la posición de cada antena se usan simples
potenciómetros,acoplados por medio de engranajes. Estos potenciómetros
se alimentan con una tensión regulada de 5V para mantener una lectura de
posición estable, sin que la afecte el consumo de los motores.
Por suerte el soft desarrollado por K3NG, prevee la calibración de estos
sensores, incluyendo compensaciones por falta de linealidad.
Para el eje de del rotor de elevación, se fabricó un simple soporte a rulemanes,que permite un movimiento suave y firme.


Una vez concluido el montaje mecánico,sólo queda unirlo a la placa de
control. Esta se resume a un Arduino UNO, un display LCD de 2x16
caracteres,y los botones de comando.
La operación de la unidad es simple, de forma autónoma, nos permite
manejar ambos rotores, pulsando los controles del frente : arriba- abajo
/ izquierda-derecha,y mostrando la posición en grados en el display.
 |
| Gabinete reciclado y display LCD |
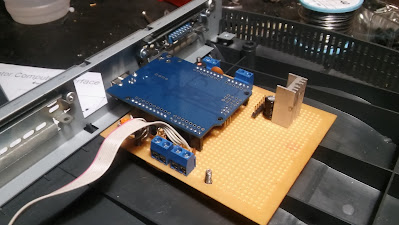 |
| La placa de soporte con el Arduino Uno |
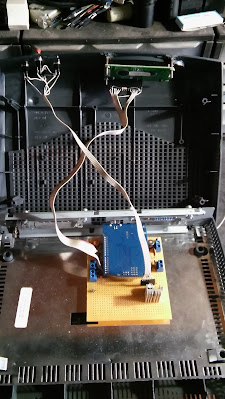 |
| Conexiónes de la placa y el frente |
 |
| El gabinete terminado |
Si conectamos el puerto USB del Arduino a nuestra PC, por medio de los
protocolos GS-232 de Yaesu o Easycom, podemos manejarlas con cualquier
soft de trackeo: Orbitron, HRD, Nova, SatPC32, etc.
Esta pequeña descripción sólo intenta mostrar las posibilidades que nos pueden dar los materiales que tenemos a mano.
Para construir un rotor de uso en exterior, quizás lo más rápido sería combinar un rotor AZ comercial (hay muchos y accesibles) y dedicarse a la construcción del rotor EL.
Un sistema sencillo pero muy eficaz, es el método de accionador tipo tornillo sinfín, como el que usan las parábolas, o los brazos de portones rebatibles.
Para empezar podemos usar un control manual, y luego "actualizarlo" a automático.
Este rotor se encuentra actualmente en funcionamiento en el aula de LU4DQ.



Comentarios
Publicar un comentario
Cualquier comentario agresivo o descalificativo será moderado.